 Большинство живущих на суше животных, обладающих скелетом (экзо- или эндо-), умеют прыгать. Такая способность особенно важна для выживания, так как бег – это, по сути, последовательность прыжков. Если робот не умеет прыгать, его способность к передвижению очень ограничено. Особенно это касается небольших роботов, для который даже низкие стены и узкие канавы становятся непреодолимым препятствием. Группа роботехников из Пенсильванского университета научила шестиногого ползающего робота прыгать и наделили его поистине акробатическими способностями.
Большинство живущих на суше животных, обладающих скелетом (экзо- или эндо-), умеют прыгать. Такая способность особенно важна для выживания, так как бег – это, по сути, последовательность прыжков. Если робот не умеет прыгать, его способность к передвижению очень ограничено. Особенно это касается небольших роботов, для который даже низкие стены и узкие канавы становятся непреодолимым препятствием. Группа роботехников из Пенсильванского университета научила шестиногого ползающего робота прыгать и наделили его поистине акробатическими способностями.
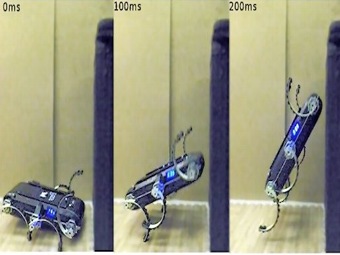
Робот X-RHex Lite (XRL) может не только преодолевать препятствия одним прыжком, но и взбираться, прыгая, по отвесной поверхности, а также с разбега «перелетать» через «пропасти».
Весит робот 6,7 килограмм, его высота – 20 сантиметров, длина – 51 сантиметр. У него шесть ног в виде полукруга, изготовленных из стекловолокна. С одной стороны они покрыты резиновыми накладками, чтобы ноги удерживались на скользкой поверхности. Ноги обладают упругостью, и поэтому могут запасать энергию предыдущего движения – это свойство очень помогает XRL прыгать и бегать.
Каждая нога оснащена независимым бесколлекторным электродвигателем Maxon мощностью в 50 ватт. Это, опять же, увеличивает маневренность XRL. Корпус робота изготовлен из алюминиевых частей, изготовленных на станке гидроабразивной резки, и покрыт оболочкой из углеродного волокна. Та защищает «внутренности» робота от ударов и придает XRL жесткость. Электронная «начинка» робота включает батарейный отсек, управляющий компьютер и три электронных устройства, каждое из которых контролирует два мотора.
{youtube}kV9J-oayCBU&feature{/youtube}
XRL способен на настоящие подвиги: он с разбега перепрыгивает через щель шириной в 60 сантиметров, прыгает в высоту на 30 сантиметров, запрыгивает на уступ высотой 29 сантиметров и взбирается на парту высотой 73 сантиметра.
Пенсильванская команда представила XRL на Международной конференции по роботам и автоматике, организованной Институтом инженеров по электротехнике и электронике. Сейчас ученые думают над новыми формами акробатического движения для XRL.