Как известно, КПД солнечной панели максимально при попадании на нее прямых солнечных лучей. Но т.к. солнце постоянно движется по горизонту, то КПД солнечных батарей сильно падает, когда солнечные лучи падают на панель под углом. Чтобы повысить КПД солнечных панелей, применяются системы следящие за солнцем и автоматически поворачивающие солнечную панель для попадания прямых лучей.
В данной статье представлена схема устройства слежения за солнцем или по другому трэкер (Solar Tracker).
Схема трэкера проста, компактна и вы легко сможете собрать ее своими руками. Для определения позиции солнца, используются два фоторезистора. Мотор включен по схеме H-моста (H-bridge), который позволяет коммутировать ток до 500 мА при напряжении питания 6-15В. В темноте, устройство также работоспособно и будет поворачивать моторчик на наиболее яркий источник света.
Принципиальная схема устройства слежения за солнцем
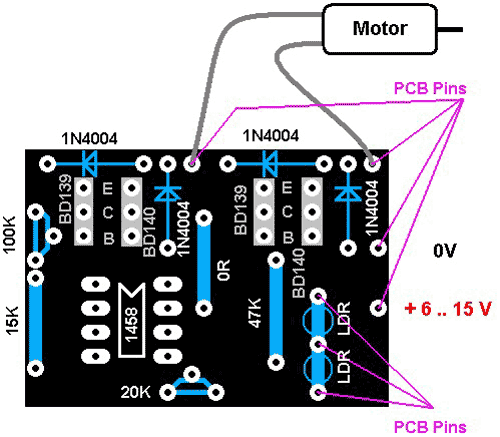
Как видно на рисунке ниже, схема проста до безобразия и содержит микросхему операционного усилителя LM1458 (К140УД20), транзисторы BD139 (КТ815Г, КТ961А) и BD140 (КТ814Г,КТ626В), фоторезисторы, диоды 1N4004 (КД243Г), резисторы и подстроечные резисторы.
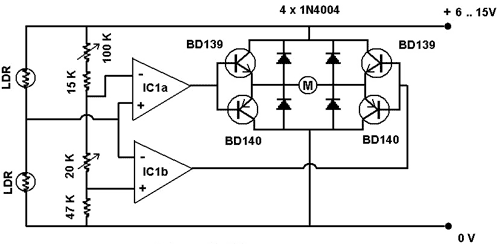
Из схемы видно, что мотор М приводится в движение при разных значениях на выходах ОУ IC1a и IC1b. Таблица истинности:
| Выход IC1a | Выход IC1b | Состояние мотора |
| Низк. | Низк. | Остановлен |
| Низк. | Выс. | Вперед * |
| Выс. | Выс. | Остановлен |
| Выс. | Низк. | Назад * |
* или наоборот, зависит от подключения мотора
Транзисторы в схеме работают в паре, по диагонали, коммутируя +Ve или -Ve к мотору, и заставляя его вращаться вперед или назад.
Во время остановки мотора, он продолжает вращаться, т.к. присутствует вращающийся момент. Вследствие этого, мотор какое-то время генерирует мощность, которая может вывести транзисторы из строя. Для защиты транзисторов от противоЭДС в схеме моста используется 4 диода.
Входной каскад состоит из двух ОУ (IC1) и фоторезисторов LDR и LDR’. Если количество света, попадающее на них одинаково, то сопротивления фоторезисторов также равны. Следовательно, если напряжение питания 12В, то в месте соединения фоторезисторов LDR LDR’ будет напряжение в 6В. Если количество света попадающего на один фоторезистор будет больше, чем на другом фоторезисторе, то напряжение будет изменяться.
Ограничения (лимиты) от +V до 0V устанавливаются четырьмя последовательно соединенными резисторами и подстраивается 2-мя подстроечными резисторами. Если напряжение выйдет за пределы этих ограничений, то ОУ запустит мотор и он постоянно будет вращаться.
Подстроечный резистор 20K регулируют чувствительность, т.е. диапазон между лимитами. Подстроечник 100К регулирует то, насколько лимиты будут симметричны относительно +V/2 (точка баланса).
Настройка схемы:
1. Проверьте напряжение источника питания схемы
2. Подключите двигатель пост. тока
3. Установите фоторезисторы рядом, чтобы на них попадало одинаковое количество света.
4. Полностью выкрутите оба подстроечный резистора против часовой стрелки
5. Подайте питание на схему. Моторчик закрутиться
6. Вращайте подстроечник 100К по часовой стрелке до тех пор, пока он не остановится. Отметьте эту позицию.
7. Продолжайте вращать подстроечник 100К по часовой стрелке до тех пор, пока мотор не начнет вращаться в другую сторону. Отметьте эту позицию.
8. Разделите угол между двумя позициями пополам и установите там подстроечник (это будет точка баланса).
9. Теперь, вращайте подстроечник 20К по часовой стрелке до тех пор, пока мотор не начнет дергаться
10. Немного верните положение подстроечника назад (против часовой стрелки), чтобы мотор остановился (данный подстроечник отвечает за чувствительность)
11. Проверьте корректность работы схемы, поочередно заслоняя от света один и второй фоторезисторы.
http://cxem.net


