
Новий AI-контролер для екзоскелетів, здатний вивчати різні рухи людини без спеціального програмування, продемонстрував значну економію енергії, знаменуючи великий крок вперед у технології переносних роботів.
Уявіть собі безпечніші й ефективніші пересування для працівників фабрик і астронавтів, а також покращену мобільність для людей з обмеженими можливостями. Це може колись стати більш поширеною реальністю завдяки новому дослідженню, опублікованому 12 червня в журналі Nature.
Так звані «екзоскелети», переносні роботизовані каркаси для людського тіла обіцяють легші пересування, але технологічні перешкоди обмежили їх ширше застосування, пояснив доктор Шужень Луо з Аеронавтичного університету Ембрі-Ріддла — перший автор статті Nature разом із автором-кореспондентом доктором Хао. Су з Університету штату Північна Кароліна (штат Північна Кароліна) та інші колеги.
На сьогодні екзоскелети повинні бути попередньо запрограмовані для певної діяльності та окремих людей на основі тривалих, дорогих і трудомістких тестів на людях, зазначив Луо.
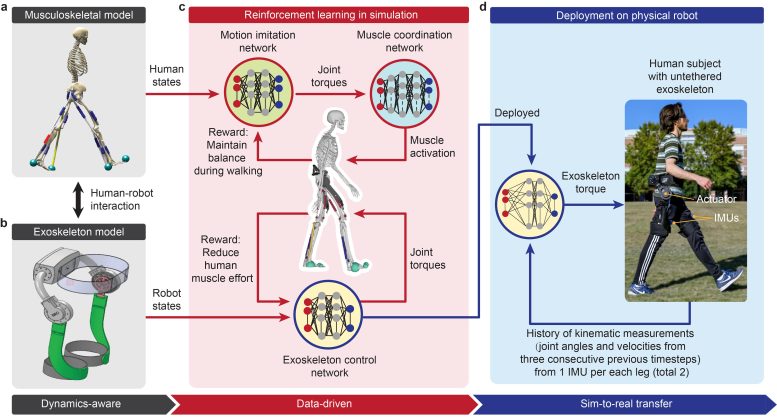
Nature , Luo та ін., малюнок 2.
Представляємо керування за допомогою ШІ
Тепер дослідники описали суперрозумний або «навчений» контролер, який використовує штучний інтелект (AI) і комп’ютерне моделювання, що інтенсивно обробляє дані, для навчання портативних роботизованих екзоскелетів.
«Цей новий контролер забезпечує плавну безперервну підтримку крутного моменту при ходьбі, бігу або підйомі сходами без необхідності тестування за участю людини», — повідомив Луо. «За допомогою лише одного запуску на графічному процесорі ми можемо навчити закон керування або «політику» в симуляції, щоб контролер міг ефективно допомагати всім трьом видам діяльності та різним особам».
Революційне скорочення енергії
Керований трьома взаємопов’язаними багаторівневими нейронними мережами, контролер навчається по ходу — розвиваючись через «мільйони епох моделювання опорно-рухового апарату для покращення мобільності людини», — пояснив д-р Луо, доцент кафедри машинобудування в Дейтона-Біч Embry-Riddle, Флорида, кампус.
Безекспериментальна структура «навчання в симуляції», розгорнута на спеціальному екзоскелеті стегна, призвела до найвищого на сьогодні зниження швидкості метаболізму портативних екзоскелетів стегна — у середньому на 24,3%, 13,1% і 15,4%. % зменшення витрат енергії користувачами на ходьбу, біг і підйом по сходах відповідно.
Ці показники зниження енергії були розраховані шляхом порівняння продуктивності людей як з роботизованим екзоскелетом, так і без нього, пояснив Су з штату NC. «Це означає, що це справжній показник того, скільки енергії зберігає екзоскелет», — сказав Су, доцент кафедри машинобудування та аерокосмічної інженерії. «Ця робота, по суті, перетворює наукову фантастику в реальність — дозволяє людям витрачати менше енергії під час виконання різноманітних завдань».
Подолання розриву між моделюванням і реальністю
Вважається, що цей підхід є першим, хто продемонстрував доцільність розробки контролерів у моделюванні, які подолають так звану симуляцію до реальності, або «розрив sim2real», одночасно значно покращуючи продуктивність людини.
«Попередні досягнення в навчанні з підкріпленням, як правило, зосереджувались на моделюванні та настільних іграх, — сказав Луо, — тоді як ми запропонували новий метод — а саме, динамічний спосіб навчання з підкріпленням, керований даними, для навчання та керування носимими роботами безпосередньо принести користь людям».
Фреймворк «може запропонувати узагальнену та масштабовану стратегію для швидкого, широкого розгортання різноманітних допоміжних роботів як для здорових людей, так і для людей з обмеженими можливостями пересування», додав Су.
Подолання технологічних перешкод
Як зазначалося, екзоскелети традиційно вимагали створених вручну законів контролю, заснованих на трудомістких тестах на людині, щоб впоратися з кожною діяльністю та врахувати відмінності в індивідуальній ході, пояснили дослідники в журналі «Nature». Підхід до навчання в симуляції запропонував можливе вирішення цих перешкод.
Отриманий «підхід до навчання з підкріпленням, що базується на динаміці та на основі даних» значно прискорює розробку екзоскелетів для впровадження в реальному світі, сказав Луо. Симуляція замкнутого циклу включає як контролер екзоскелета, так і фізичні моделі динаміки опорно-рухового апарату, взаємодії людини з роботом і м’язових реакцій для створення ефективних і реалістичних даних. Таким чином політика контролю може розвиватися або навчатися в симуляції.
«Наш метод забезпечує основу для готових рішень у розробці контролерів для переносних роботів», — сказав Луо.
Майбутні напрямки дослідження екзоскелету
Майбутні дослідження будуть зосереджені на унікальній ході для ходьби, бігу або підйому сходами, щоб допомогти людям з такими вадами, як інсульт, остеоартрит і церебральний параліч, а також людям з ампутаціями.