
Група фахівців із Шеньянського інституту автоматизації Китайської академії наук розробила м’якого робота у формі риби, здатного змінювати режими плавання залежно від умов середовища. Ключова особливість нової розробки – інтеграція систем руху, сприйняття та управління в єдиному устрої. Робот може поєднувати чотири різні режими плавання, що вигідно відрізняє його від існуючих аналогів.
В основі конструкції лежить біонічний підхід. Інженери відтворили структуру скумбрії, використовуючи технологію 3D-друку для створення гнучкого каркасу у поєднанні з м’яким приводом. Останній складається з трьох функціональних шарів: пружин стиснення, діелектричних еластомерних мембран та гнучких електродів.
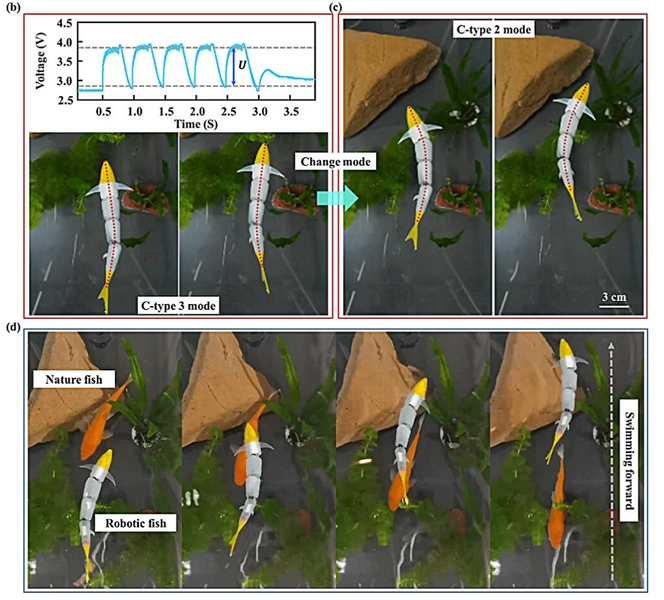
Для сприйняття змін у навколишньому середовищі розробники застосували високоточні гнучкі датчики деформації. Ці сенсори дозволяють роботу визначати своє становище у воді та параметри довкілля, що забезпечує можливість перемикання між оптимальними режимами плавання. Синхронне управління амплітудою збудження та послідовністю роботи кількох біонічних м’язових блоків дозволяє роботу відтворювати різні режими плавання, характерні для живих риб, та пристосовуватися до мінливих умов водного середовища.
Розробка демонструє потенціал у галузі підводної робототехніки та може знайти застосування у дослідженні морських екосистем, пошуково-рятувальних операціях та інших сферах, що потребують ефективного пересування під водою. Створення адаптивних роботів, здатних імітувати рухи живих організмів, відкриває шлях до створення досконаліших підводних пристроїв на вирішення широкого спектра завдань.