Роботи, створені на основі м’яких матеріалів, часто краще копіюють зовнішність, рухи та здібності як людей, так і тварин. Хоча зараз існує незліченна кількість м’яких роботів, багато з них важко виробляти у великих масштабах через високу вартість їхніх компонентів або складний процес виготовлення.
Дослідники з університету Коїмбра в Португалії нещодавно розробили нову м’яку роботизовану руку, яка може бути доступнішою та легшою у виготовленні. Їх дизайн, представлений у Cyborg і Bionic Systems, об’єднує м’які приводи з екзоскелетом, обидва з яких можна виготовити за допомогою масштабованих технологій.
«Більшість роботів зроблені з твердих матеріалів», — сказав Tech Xplore Педро Нето, один із дослідників, які проводили дослідження. «Однак, коли ми спостерігаємо за тваринами, ми помічаємо, що їхні тіла можуть складатися з твердих частин (скелетів) і м’яких частин (таких як м’язи). Деякі тварини, як-от дощові черв’яки, повністю м’які. Беручи натхнення з природи, ми передбачаємо, що наступне покоління роботів включатиме компоненти з м’яких матеріалів або, в деяких випадках, вони можуть бути повністю м’якими».
Порівняно з жорсткими роботами, м’які роботизовані системи можуть бути безпечнішими та краще співіснувати з людьми чи тваринами як на вулиці, так і в приміщенні. Наприклад, якщо вони зіткнуться з людьми, тваринами або предметами, що їх оточують, ці роботи з меншою ймовірністю завдадуть значних пошкоджень або травм.
Основною метою нещодавньої роботи Нето та його колег була розробка нової м’якої роботизованої руки, яка була б безпечною та доступною за ціною. Теоретично таку руку було б легше розгорнути у великому масштабі, таким чином сприяючи новим дослідженням та інноваціям у сфері робототехніки.
«Ми використали аналіз кінцевих елементів, щоб оптимізувати конструкцію перед фізичним виготовленням руки, зменшивши витрати на створення прототипів», — пояснив Нето. «Використання звичайного 3D-друку виявилося ефективним завдяки безпосередньому друку деяких компонентів у м’яких матеріалах і друку форм у твердих матеріалах».
М’яка роботизована рука, створена Нето та його колегами, заснована на кількох різних матеріалах. Його ретельно розроблена структура мала відтворити зовнішній вигляд і функціональність людських рук, відтворюючи їхні рухи та здібності.
«Конфігурація роботизованої руки складається з п’яти м’яких приводів, кожен з яких відповідає пальцю, і екзоскелета, який сприяє згинанню пальця», — сказав Нето. «Контролер ON-OFF підтримує задані кути згинання пальців, дозволяючи руці ефективно захоплювати предмети різної форми, ваги та розмірів».
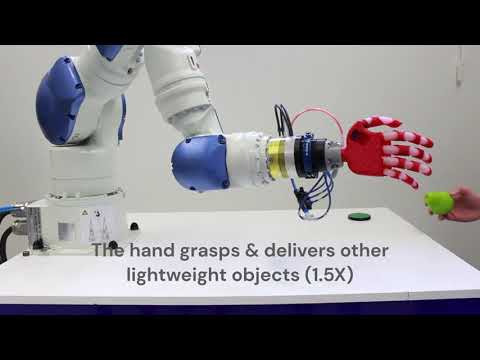
До цього часу дослідники оцінювали роботу своєї роботизованої руки в серії симуляцій та експериментів. Їх початкові результати дуже багатообіцяючі, оскільки рука могла успішно захоплювати численні предмети різної форми, ваги та розміру.
«Основним внеском є інтегрована система проєктування та виготовлення, яка використовує аналіз кінцевих елементів для оптимізації конструкції перед їх виготовленням», — сказав Нето. «Це досягнення має потенціал для підвищення доступності м’яких рук роботів, одночасно знижуючи витрати та усуваючи зазвичай трудомісткі процедури проєктування та виготовлення, які часто покладаються на ресурсомісткі ітераційні робочі процеси».
У майбутньому м’яка роботизована рука, розроблена цією командою дослідників, може використовуватися як академічними командами, так і окремими робототехніками для тестування нових алгоритмів штучного інтелекту (ШІ) та інших обчислювальних інструментів, спрямованих на вдосконалення здібностей роботів. Крім того, його дизайн може відкрити нові шляхи для недорогого виготовлення гуманоїдних роботів, які можуть допомагати людям у їхніх повсякденних справах.
«Наші наступні дослідження будуть зосереджені на вдосконаленні виготовлення м’яких приводів і датчиків, щоб підвищити доступність м’яких роботів для ширшої аудиторії», — додав Нето. «Керування м’якими роботами за допомогою штучного інтелекту — ще одна дослідницька тема, над якою ми працюємо».