Нам всім коли-небудь доводилося пробиратися через сильно захаращену область простору або повертатися з дуже бурхливою і веселої вечірки. І в таких випадках на допомогу нашим ногам завжди приходять наші ж руки, що дозволяють придбати ще одну точку опори, перенести на неї частину ваги і зберегти рівновагу в складній ситуації. І зараз деякі з фахівців-робототехников намагаються прищепити можливість «многоточечного» переміщення роботам, що дозволить їм успішно пересуватися в умовах складної навколишнього середовища і моментально реагувати на якісь або різкі зміни.
Однак, така проста на перший погляд завдання не є простою насправді. Для забезпечення можливості «многоточечного» переміщення робот повинен мати відповідні апаратні частини, які відсутні у більшості роботів, і спеціалізовані алгоритми, в яких закладені принципи використання цих додаткових апаратних частин.
Одним з перших роботів, який почав освоювати техніку «многоточечного» переміщення, став гуманоїдний робот LOLA, створений дослідниками з Технологічного університету Мюнхена, Німеччина. У порівнянні з оригінальною версією новий робот має масу значних поліпшень і доповнень. І, незважаючи на те, що програмні алгоритми управління всім цим ще знаходяться на ранній стадії розробки, робот LOLA вже може демонструвати при ходьбі деякі елементи, властиві до цього моменту тільки людям.
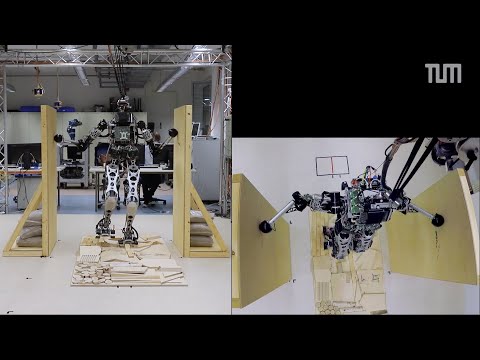
На даний момент часу система управління робота LOLA не може повністю самостійно вирішувати, в яких ситуаціях треба задіяти руки, а в яких — ні. Поки дослідники ставлять безпосередньо точки контакту рук, положення ніг і рук і інші дані, а робот лише точно дотримується цих інструкцій. Однак, в майбутньому все це буде виконуватися в повністю автоматичному режимі.
Зараз дослідники розробляють складні динамічні моделі руху, в яких можуть фігурувати кілька точок контакту, динамічний перенесення точки рівноваги робота і інші функції. Ці моделі ляжуть в основу нової системи управління, яка буде самостійно прораховувати переміщення робота і керувати ним в режимі реального часу. Джерело